



၄။ BMS ၏ အဓိကဆော့ဖ်ဝဲလုပ်ဆောင်ချက်များ
l တိုင်းတာမှုလုပ်ဆောင်ချက်
(၁) အခြေခံအချက်အလက်တိုင်းတာခြင်း- ဘက်ထရီဗို့အား၊ လျှပ်စီးကြောင်းအချက်ပြမှုနှင့် ဘက်ထရီအထုပ်အပူချိန်ကို စောင့်ကြည့်ခြင်း။ ဘက်ထရီစီမံခန့်ခွဲမှုစနစ်၏ အခြေခံအကျဆုံးလုပ်ဆောင်ချက်မှာ ဘက်ထရီဆဲလ်များ၏ ဗို့အား၊ လျှပ်စီးကြောင်းနှင့် အပူချိန်ကို တိုင်းတာရန်ဖြစ်ပြီး၊ ၎င်းသည် ဘက်ထရီစီမံခန့်ခွဲမှုစနစ်၏ ထိပ်တန်းတွက်ချက်မှုများနှင့် ထိန်းချုပ်မှုယုတ္တိဗေဒအားလုံး၏ အခြေခံဖြစ်သည်။
(၂) လျှပ်ကာခုခံမှု ထောက်လှမ်းခြင်း- ဘက်ထရီစနစ်တစ်ခုလုံးနှင့် မြင့်မားသောဗို့အားစနစ်တစ်ခုလုံးကို ဘက်ထရီစီမံခန့်ခွဲမှုစနစ်မှ လျှပ်ကာခံနိုင်ရည်ရှိမရှိ စမ်းသပ်ရန် လိုအပ်သည်။
(၃) မြင့်မားသောဗို့အားအပြန်အလှန်ချိတ်ဆက်မှုထောက်လှမ်းခြင်း (HVIL): မြင့်မားသောဗို့အားစနစ်တစ်ခုလုံး၏ တည်တံ့မှုကို အတည်ပြုရန်အသုံးပြုသည်။ မြင့်မားသောဗို့အားစနစ်ပတ်လမ်း၏ တည်တံ့မှုပျက်စီးသွားသောအခါ၊ ဘေးကင်းရေးအစီအမံများကို အသက်ဝင်စေသည်။
လီခန့်မှန်းချက်လုပ်ဆောင်ချက်
(၁) SOC နှင့် SOH ခန့်မှန်းချက်- အဓိကနှင့် အခက်ခဲဆုံးအပိုင်း
(၂) ဟန်ချက်ညီစေခြင်း- မိုနိုမာများအကြား SOC x စွမ်းရည် မညီမျှမှုကို ဟန်ချက်ညီဆားကစ်မှတစ်ဆင့် ချိန်ညှိပါ။
(3) ဘက်ထရီပါဝါကန့်သတ်ချက်- ဘက်ထရီ၏ အဝင်နှင့်အထွက်ပါဝါကို မတူညီသော SOC အပူချိန်များတွင် ကန့်သတ်ထားသည်။
လီအခြားလုပ်ဆောင်ချက်များ
(၁) Relay ထိန်းချုပ်မှု- main +၊ main-၊ အားသွင်း relay +၊ အားသွင်း relay -၊ ကြိုတင်အားသွင်း relay အပါအဝင်
(၂) အပူချိန်ထိန်းချုပ်မှု
(၃) ဆက်သွယ်ရေး လုပ်ဆောင်ချက်
(၄) ချို့ယွင်းချက်ရှာဖွေခြင်းနှင့် အချက်ပေးသံ
(၅) ချို့ယွင်းချက်ဒဏ်ခံနိုင်သော လုပ်ဆောင်ချက်
၅။BMS ရဲ့ အဓိက software လုပ်ဆောင်ချက်တွေ
လီတိုင်းတာမှုလုပ်ဆောင်ချက်
(၁) အခြေခံအချက်အလက်တိုင်းတာခြင်း- ဘက်ထရီဗို့အား၊ လျှပ်စီးကြောင်းအချက်ပြမှုနှင့် ဘက်ထရီအထုပ်အပူချိန်ကို စောင့်ကြည့်ခြင်း။ ဘက်ထရီစီမံခန့်ခွဲမှုစနစ်၏ အခြေခံအကျဆုံးလုပ်ဆောင်ချက်မှာ ဘက်ထရီဆဲလ်များ၏ ဗို့အား၊ လျှပ်စီးကြောင်းနှင့် အပူချိန်ကို တိုင်းတာရန်ဖြစ်ပြီး၊ ၎င်းသည် ဘက်ထရီစီမံခန့်ခွဲမှုစနစ်၏ ထိပ်တန်းတွက်ချက်မှုများနှင့် ထိန်းချုပ်မှုယုတ္တိဗေဒအားလုံး၏ အခြေခံဖြစ်သည်။
(၂) လျှပ်ကာခုခံမှု ထောက်လှမ်းခြင်း- ဘက်ထရီစနစ်တစ်ခုလုံးနှင့် မြင့်မားသောဗို့အားစနစ်တစ်ခုလုံးကို ဘက်ထရီစီမံခန့်ခွဲမှုစနစ်မှ လျှပ်ကာခံနိုင်ရည်ရှိမရှိ စမ်းသပ်ရန် လိုအပ်သည်။
(၃) မြင့်မားသောဗို့အားအပြန်အလှန်ချိတ်ဆက်မှုထောက်လှမ်းခြင်း (HVIL): မြင့်မားသောဗို့အားစနစ်တစ်ခုလုံး၏ တည်တံ့မှုကို အတည်ပြုရန်အသုံးပြုသည်။ မြင့်မားသောဗို့အားစနစ်ပတ်လမ်း၏ တည်တံ့မှုပျက်စီးသွားသောအခါ၊ ဘေးကင်းရေးအစီအမံများကို အသက်ဝင်စေသည်။
လီခန့်မှန်းချက်လုပ်ဆောင်ချက်
(၁) SOC နှင့် SOH ခန့်မှန်းချက်- အဓိကနှင့် အခက်ခဲဆုံးအပိုင်း
(၂) ဟန်ချက်ညီစေခြင်း- မိုနိုမာများအကြား SOC x စွမ်းရည် မညီမျှမှုကို ဟန်ချက်ညီဆားကစ်မှတစ်ဆင့် ချိန်ညှိပါ။
(3) ဘက်ထရီပါဝါကန့်သတ်ချက်- ဘက်ထရီ၏ အဝင်နှင့်အထွက်ပါဝါကို မတူညီသော SOC အပူချိန်များတွင် ကန့်သတ်ထားသည်။
လီအခြားလုပ်ဆောင်ချက်များ
(၁) Relay ထိန်းချုပ်မှု- main +၊ main-၊ အားသွင်း relay +၊ အားသွင်း relay -၊ ကြိုတင်အားသွင်း relay အပါအဝင်
(၂) အပူချိန်ထိန်းချုပ်မှု
(၃) ဆက်သွယ်ရေး လုပ်ဆောင်ချက်
(၄) ချို့ယွင်းချက်ရှာဖွေခြင်းနှင့် အချက်ပေးသံ
(၅) ချို့ယွင်းချက်ဒဏ်ခံနိုင်သော လုပ်ဆောင်ချက်
၆။BMS ဆော့ဖ်ဝဲလ် ဗိသုကာ
လီဗို့အား မြင့်မားခြင်းနှင့် နိမ့်ကျခြင်း စီမံခန့်ခွဲမှု
ပုံမှန်အားဖြင့် ပါဝါဖွင့်ထားချိန်တွင် BMS ကို hard line သို့မဟုတ် 12V CAN signal မှတစ်ဆင့် VCU မှ နှိုးပါသည်။ BMS သည် self-check ပြီးမြောက်ပြီး standby ထဲသို့ဝင်ပြီးနောက် VCU သည် high-voltage command ပေးပို့ပြီး BMS သည် high-voltage ချိတ်ဆက်မှုကို အပြီးသတ်ရန် relay ပိတ်ခြင်းကို ထိန်းချုပ်ပါသည်။ ပါဝါပိတ်လိုက်သောအခါ VCU သည် low-voltage command ပေးပို့ပြီးနောက် 12V wake-up ကို ဖြတ်တောက်ပါသည်။ power-off state တွင် အားသွင်းရန် သေနတ်ကို ထည့်သွင်းသောအခါ CP သို့မဟုတ် A+ signal ဖြင့် နှိုးနိုင်ပါသည်။
လီအားသွင်းခြင်းစီမံခန့်ခွဲမှု
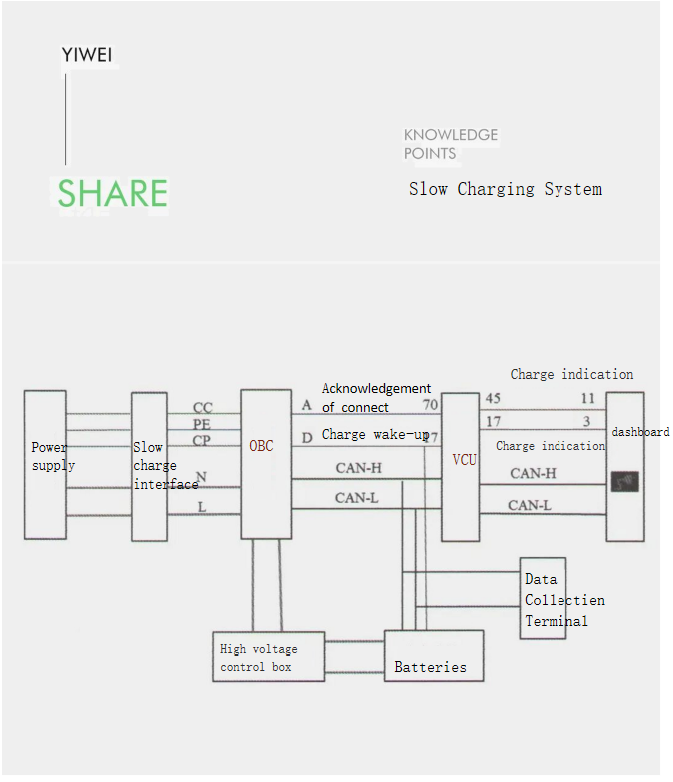
(၁) နှေးကွေးစွာ အားသွင်းခြင်း
နှေးကွေးစွာအားသွင်းခြင်းဆိုသည်မှာ အားသွင်းပုံ (သို့မဟုတ် 220V ပါဝါထောက်ပံ့မှု) ၏ on-board charger မှ alternating current မှပြောင်းလဲထားသော direct current ဖြင့် ဘက်ထရီကို အားသွင်းခြင်းဖြစ်သည်။ အားသွင်းပုံ၏ သတ်မှတ်ချက်များမှာ ယေဘုယျအားဖြင့် 16A၊ 32A နှင့် 64A ဖြစ်ပြီး အိမ်သုံးပါဝါထောက်ပံ့မှုမှတစ်ဆင့်လည်း အားသွင်းနိုင်သည်။ BMS ကို CC သို့မဟုတ် CP အချက်ပြမှုဖြင့် နှိုးနိုင်သော်လည်း အားသွင်းပြီးနောက် ပုံမှန်အိပ်ပျော်နေကြောင်း သေချာစေရမည်။ AC အားသွင်းခြင်းလုပ်ငန်းစဉ်သည် အတော်လေးရိုးရှင်းပြီး အသေးစိတ်အမျိုးသားစံနှုန်းများနှင့်အညီ တီထွင်နိုင်သည်။
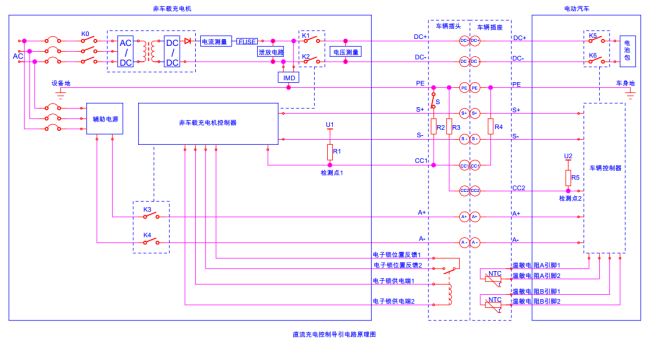
(၂) အမြန်အားသွင်းခြင်း
အမြန်အားသွင်းခြင်းဆိုသည်မှာ DC အားသွင်းတိုင်မှ တိုက်ရိုက်လျှပ်စီးကြောင်းထွက်ရှိမှုဖြင့် ဘက်ထရီကို အားသွင်းခြင်းဖြစ်ပြီး ၎င်းသည် 1C သို့မဟုတ် ထို့ထက်ပို၍ အားသွင်းနှုန်းကို ရရှိနိုင်သည်။ ယေဘုယျအားဖြင့် ဘက်ထရီ၏ 80% ကို မိနစ် ၄၅ အတွင်း အားသွင်းနိုင်သည်။ အားသွင်းတိုင်၏ အရန်ပါဝါအရင်းအမြစ် A+ အချက်ပြမှုဖြင့် ၎င်းကို နှိုးနိုင်သည်။
လီခန့်မှန်းချက်လုပ်ဆောင်ချက်
(1) SOP (State of Power) သည် အဓိကအားဖြင့် အပူချိန်နှင့် SOC မှတစ်ဆင့် ဇယားများကို ရှာဖွေခြင်းဖြင့် လက်ရှိဘက်ထရီ၏ ရရှိနိုင်သော အားသွင်းခြင်းနှင့် အားလျော့ခြင်း ပါဝါကို ရယူသည်။ VCU သည် ပေးပို့သော ပါဝါတန်ဖိုးအပေါ် အခြေခံ၍ ယာဉ်တစ်ခုလုံးကို မည်သို့အသုံးပြုသည်ကို ဆုံးဖြတ်သည်။
(2) SOH (ကျန်းမာရေးအခြေအနေ) သည် အဓိကအားဖြင့် ဘက်ထရီ၏ လက်ရှိကျန်းမာရေးအခြေအနေကို ၀-၁၀၀% အကြားရှိ တန်ဖိုးဖြင့် ဖော်ပြပေးသည်။ ဘက်ထရီသည် ၈၀% အောက် ကျဆင်းသွားပြီးနောက် အသုံးပြု၍မရဟု ယေဘုယျအားဖြင့် ယူဆကြသည်။
(၃) SOC (State of Charge) သည် BMS ၏ အဓိကထိန်းချုပ်မှု အယ်လဂိုရီသမ်တွင် ပါဝင်ပြီး လက်ရှိကျန်ရှိနေသော စွမ်းရည်အခြေအနေကို ဖော်ပြပေးသည်။ ၎င်းသည် အဓိကအားဖြင့် ampere-hour integral နည်းလမ်းနှင့် EKF (extended Kalman filter) အယ်လဂိုရီသမ်ကို ပြင်ဆင်မှုဗျူဟာများ (ဥပမာ open-circuit voltage ပြင်ဆင်ခြင်း၊ full charge ပြင်ဆင်ခြင်း၊ end-of-charge ပြင်ဆင်ခြင်း၊ မတူညီသော အပူချိန်များနှင့် SOH အောက်တွင် စွမ်းရည်ပြင်ဆင်ခြင်း၊ စသည်ဖြင့်) နှင့် ပေါင်းစပ်ထားသည်။
(၄) SOE (State of Energy) အယ်လဂိုရီသမ်ကို ပြည်တွင်းထုတ်လုပ်သူများက ကျယ်ကျယ်ပြန့်ပြန့် တီထွင်ထားခြင်း မရှိသလို လက်ရှိအခြေအနေအောက်တွင် ကျန်ရှိနေသော စွမ်းအင်နှင့် အများဆုံးရရှိနိုင်သော စွမ်းအင်အချိုးကို ရရှိရန် ရိုးရှင်းသော အယ်လဂိုရီသမ်များကို အသုံးပြုထားခြင်း မရှိပါ။ ဤလုပ်ဆောင်ချက်ကို အဓိကအားဖြင့် ကျန်ရှိနေသော cruising range ကို ခန့်မှန်းရန်အတွက် အသုံးပြုသည်။
လီချို့ယွင်းချက်ရှာဖွေခြင်း
ဘက်ထရီ၏ စွမ်းဆောင်ရည်ကွဲပြားမှုပေါ် မူတည်၍ ချို့ယွင်းချက်အဆင့်အမျိုးမျိုးကို ခွဲခြားထားပြီး၊ သတိပေးချက်များ၊ ပါဝါကန့်သတ်ချက် သို့မဟုတ် မြင့်မားသောဗို့အားကို တိုက်ရိုက်ဖြတ်တောက်ခြင်းကဲ့သို့သော ချို့ယွင်းချက်အဆင့်အမျိုးမျိုးအောက်တွင် BMS နှင့် VCU မှ လုပ်ဆောင်ချက်အမျိုးမျိုးကို လုပ်ဆောင်ပါသည်။ ချို့ယွင်းချက်များတွင် ဒေတာရယူခြင်းနှင့် ကျိုးကြောင်းဆီလျော်မှုဆိုင်ရာ ချို့ယွင်းချက်များ၊ လျှပ်စစ်ချို့ယွင်းချက်များ (အာရုံခံကိရိယာများနှင့် actuator များ)၊ ဆက်သွယ်ရေးချို့ယွင်းချက်များနှင့် ဘက်ထရီအခြေအနေချို့ယွင်းချက်များ စသည်တို့ ပါဝင်သည်။
၁။BMS ရဲ့ အဓိက software လုပ်ဆောင်ချက်တွေ
လီတိုင်းတာမှုလုပ်ဆောင်ချက်
(၁) အခြေခံအချက်အလက်တိုင်းတာခြင်း- ဘက်ထရီဗို့အား၊ လျှပ်စီးကြောင်းအချက်ပြမှုနှင့် ဘက်ထရီအထုပ်အပူချိန်ကို စောင့်ကြည့်ခြင်း။ ဘက်ထရီစီမံခန့်ခွဲမှုစနစ်၏ အခြေခံအကျဆုံးလုပ်ဆောင်ချက်မှာ ဘက်ထရီဆဲလ်များ၏ ဗို့အား၊ လျှပ်စီးကြောင်းနှင့် အပူချိန်ကို တိုင်းတာရန်ဖြစ်ပြီး၊ ၎င်းသည် ဘက်ထရီစီမံခန့်ခွဲမှုစနစ်၏ ထိပ်တန်းတွက်ချက်မှုများနှင့် ထိန်းချုပ်မှုယုတ္တိဗေဒအားလုံး၏ အခြေခံဖြစ်သည်။
(၂) လျှပ်ကာခုခံမှု ထောက်လှမ်းခြင်း- ဘက်ထရီစနစ်တစ်ခုလုံးနှင့် မြင့်မားသောဗို့အားစနစ်တစ်ခုလုံးကို ဘက်ထရီစီမံခန့်ခွဲမှုစနစ်မှ လျှပ်ကာခံနိုင်ရည်ရှိမရှိ စမ်းသပ်ရန် လိုအပ်သည်။
(၃) မြင့်မားသောဗို့အားအပြန်အလှန်ချိတ်ဆက်မှုထောက်လှမ်းခြင်း (HVIL): မြင့်မားသောဗို့အားစနစ်တစ်ခုလုံး၏ တည်တံ့မှုကို အတည်ပြုရန်အသုံးပြုသည်။ မြင့်မားသောဗို့အားစနစ်ပတ်လမ်း၏ တည်တံ့မှုပျက်စီးသွားသောအခါ၊ ဘေးကင်းရေးအစီအမံများကို အသက်ဝင်စေသည်။
လီခန့်မှန်းချက်လုပ်ဆောင်ချက်
(၁) SOC နှင့် SOH ခန့်မှန်းချက်- အဓိကနှင့် အခက်ခဲဆုံးအပိုင်း
(၂) ဟန်ချက်ညီစေခြင်း- မိုနိုမာများအကြား SOC x စွမ်းရည် မညီမျှမှုကို ဟန်ချက်ညီဆားကစ်မှတစ်ဆင့် ချိန်ညှိပါ။
(3) ဘက်ထရီပါဝါကန့်သတ်ချက်- ဘက်ထရီ၏ အဝင်နှင့်အထွက်ပါဝါကို မတူညီသော SOC အပူချိန်များတွင် ကန့်သတ်ထားသည်။
လီအခြားလုပ်ဆောင်ချက်များ
(၁) Relay ထိန်းချုပ်မှု- main +၊ main-၊ အားသွင်း relay +၊ အားသွင်း relay -၊ ကြိုတင်အားသွင်း relay အပါအဝင်
(၂) အပူချိန်ထိန်းချုပ်မှု
(၃) ဆက်သွယ်ရေး လုပ်ဆောင်ချက်
(၄) ချို့ယွင်းချက်ရှာဖွေခြင်းနှင့် အချက်ပေးသံ
(၅) ချို့ယွင်းချက်ဒဏ်ခံနိုင်သော လုပ်ဆောင်ချက်
၂။BMS ဆော့ဖ်ဝဲလ် ဗိသုကာ
လီဗို့အား မြင့်မားခြင်းနှင့် နိမ့်ကျခြင်း စီမံခန့်ခွဲမှု
ပုံမှန်အားဖြင့် ပါဝါဖွင့်ထားချိန်တွင် BMS ကို hard line သို့မဟုတ် 12V CAN signal မှတစ်ဆင့် VCU မှ နှိုးပါသည်။ BMS သည် self-check ပြီးမြောက်ပြီး standby ထဲသို့ဝင်ပြီးနောက် VCU သည် high-voltage command ပေးပို့ပြီး BMS သည် high-voltage ချိတ်ဆက်မှုကို အပြီးသတ်ရန် relay ပိတ်ခြင်းကို ထိန်းချုပ်ပါသည်။ ပါဝါပိတ်လိုက်သောအခါ VCU သည် low-voltage command ပေးပို့ပြီးနောက် 12V wake-up ကို ဖြတ်တောက်ပါသည်။ power-off state တွင် အားသွင်းရန် သေနတ်ကို ထည့်သွင်းသောအခါ CP သို့မဟုတ် A+ signal ဖြင့် နှိုးနိုင်ပါသည်။
လီအားသွင်းခြင်းစီမံခန့်ခွဲမှု
(၁) နှေးကွေးစွာ အားသွင်းခြင်း
နှေးကွေးစွာအားသွင်းခြင်းဆိုသည်မှာ အားသွင်းပုံ (သို့မဟုတ် 220V ပါဝါထောက်ပံ့မှု) ၏ on-board charger မှ alternating current မှပြောင်းလဲထားသော direct current ဖြင့် ဘက်ထရီကို အားသွင်းခြင်းဖြစ်သည်။ အားသွင်းပုံ၏ သတ်မှတ်ချက်များမှာ ယေဘုယျအားဖြင့် 16A၊ 32A နှင့် 64A ဖြစ်ပြီး အိမ်သုံးပါဝါထောက်ပံ့မှုမှတစ်ဆင့်လည်း အားသွင်းနိုင်သည်။ BMS ကို CC သို့မဟုတ် CP အချက်ပြမှုဖြင့် နှိုးနိုင်သော်လည်း အားသွင်းပြီးနောက် ပုံမှန်အိပ်ပျော်နေကြောင်း သေချာစေရမည်။ AC အားသွင်းခြင်းလုပ်ငန်းစဉ်သည် အတော်လေးရိုးရှင်းပြီး အသေးစိတ်အမျိုးသားစံနှုန်းများနှင့်အညီ တီထွင်နိုင်သည်။
(၂) အမြန်အားသွင်းခြင်း
အမြန်အားသွင်းခြင်းဆိုသည်မှာ DC အားသွင်းတိုင်မှ တိုက်ရိုက်လျှပ်စီးကြောင်းထွက်ရှိမှုဖြင့် ဘက်ထရီကို အားသွင်းခြင်းဖြစ်ပြီး ၎င်းသည် 1C သို့မဟုတ် ထို့ထက်ပို၍ အားသွင်းနှုန်းကို ရရှိနိုင်သည်။ ယေဘုယျအားဖြင့် ဘက်ထရီ၏ 80% ကို မိနစ် ၄၅ အတွင်း အားသွင်းနိုင်သည်။ အားသွင်းတိုင်၏ အရန်ပါဝါအရင်းအမြစ် A+ အချက်ပြမှုဖြင့် ၎င်းကို နှိုးနိုင်သည်။
လီခန့်မှန်းချက်လုပ်ဆောင်ချက်
(1) SOP (State of Power) သည် အဓိကအားဖြင့် အပူချိန်နှင့် SOC မှတစ်ဆင့် ဇယားများကို ရှာဖွေခြင်းဖြင့် လက်ရှိဘက်ထရီ၏ ရရှိနိုင်သော အားသွင်းခြင်းနှင့် အားလျော့ခြင်း ပါဝါကို ရယူသည်။ VCU သည် ပေးပို့သော ပါဝါတန်ဖိုးအပေါ် အခြေခံ၍ ယာဉ်တစ်ခုလုံးကို မည်သို့အသုံးပြုသည်ကို ဆုံးဖြတ်သည်။
(2) SOH (ကျန်းမာရေးအခြေအနေ) သည် အဓိကအားဖြင့် ဘက်ထရီ၏ လက်ရှိကျန်းမာရေးအခြေအနေကို ၀-၁၀၀% အကြားရှိ တန်ဖိုးဖြင့် ဖော်ပြပေးသည်။ ဘက်ထရီသည် ၈၀% အောက် ကျဆင်းသွားပြီးနောက် အသုံးပြု၍မရဟု ယေဘုယျအားဖြင့် ယူဆကြသည်။
(၃) SOC (State of Charge) သည် BMS ၏ အဓိကထိန်းချုပ်မှု အယ်လဂိုရီသမ်တွင် ပါဝင်ပြီး လက်ရှိကျန်ရှိနေသော စွမ်းရည်အခြေအနေကို ဖော်ပြပေးသည်။ ၎င်းသည် အဓိကအားဖြင့် ampere-hour integral နည်းလမ်းနှင့် EKF (extended Kalman filter) အယ်လဂိုရီသမ်ကို ပြင်ဆင်မှုဗျူဟာများ (ဥပမာ open-circuit voltage ပြင်ဆင်ခြင်း၊ full charge ပြင်ဆင်ခြင်း၊ end-of-charge ပြင်ဆင်ခြင်း၊ မတူညီသော အပူချိန်များနှင့် SOH အောက်တွင် စွမ်းရည်ပြင်ဆင်ခြင်း၊ စသည်ဖြင့်) နှင့် ပေါင်းစပ်ထားသည်။
(၄) SOE (State of Energy) အယ်လဂိုရီသမ်ကို ပြည်တွင်းထုတ်လုပ်သူများက ကျယ်ကျယ်ပြန့်ပြန့် တီထွင်ထားခြင်း မရှိသလို လက်ရှိအခြေအနေအောက်တွင် ကျန်ရှိနေသော စွမ်းအင်နှင့် အများဆုံးရရှိနိုင်သော စွမ်းအင်အချိုးကို ရရှိရန် ရိုးရှင်းသော အယ်လဂိုရီသမ်များကို အသုံးပြုထားခြင်း မရှိပါ။ ဤလုပ်ဆောင်ချက်ကို အဓိကအားဖြင့် ကျန်ရှိနေသော cruising range ကို ခန့်မှန်းရန်အတွက် အသုံးပြုသည်။
လီချို့ယွင်းချက်ရှာဖွေခြင်း
ဘက်ထရီ၏ စွမ်းဆောင်ရည်ကွဲပြားမှုပေါ် မူတည်၍ ချို့ယွင်းချက်အဆင့်အမျိုးမျိုးကို ခွဲခြားထားပြီး၊ သတိပေးချက်များ၊ ပါဝါကန့်သတ်ချက် သို့မဟုတ် မြင့်မားသောဗို့အားကို တိုက်ရိုက်ဖြတ်တောက်ခြင်းကဲ့သို့သော ချို့ယွင်းချက်အဆင့်အမျိုးမျိုးအောက်တွင် BMS နှင့် VCU မှ လုပ်ဆောင်ချက်အမျိုးမျိုးကို လုပ်ဆောင်ပါသည်။ ချို့ယွင်းချက်များတွင် ဒေတာရယူခြင်းနှင့် ကျိုးကြောင်းဆီလျော်မှုဆိုင်ရာ ချို့ယွင်းချက်များ၊ လျှပ်စစ်ချို့ယွင်းချက်များ (အာရုံခံကိရိယာများနှင့် actuator များ)၊ ဆက်သွယ်ရေးချို့ယွင်းချက်များနှင့် ဘက်ထရီအခြေအနေချို့ယွင်းချက်များ စသည်တို့ ပါဝင်သည်။
ကြှနျုပျတို့ကိုဆကျသှယျရနျ:
yanjing@1vtruck.com +(86)13921093681
duanqianyun@1vtruck.com +(86)13060058315
liyan@1vtruck.com +(86)18200390258
ပို့စ်တင်ချိန်: ၂၀၂၃ ခုနှစ်၊ မေလ ၁၂ ရက်



